Demo 9: Plane, Volume, Line, and Surface Integrals with The Change-of-Variables Theorem#
Demo by Christian Mikkelstrup, Hans Henrik Hermansen, Jakob Lemvig, Karl Johan Måstrup Kristensen, and Magnus Troen. Revised March 2026 by shsp.
from sympy import *
from dtumathtools import *
init_printing()
When integrating scalar functions over non-axis-parallel regions, such as circular discs, spheres, and curves, we cannot directly do usual Riemann-integral with respect to the variables \(x_1,\cdots,x_n\). The textbook instead gives us a technique known as the change-of-variables theorem or variable substitution that lets us push the integration over to the parameter variables instead - given that we are able to create a regular parametric representation of the region.
This demo will first treat integration over planar regions in the \((x,y)\) plane as well as through spatial regions in \((x,y,z)\) space, so, respectively, the plane integral and the volume integral. Next the demo continues with integration along curves and over surfaces, so, respectively, the line integral and the surface integral. But before we can get started with integrations we will take a closer look at an important component in them all: the restriction of the function to the parameter region.
Restrictions to Parametrized Geometry#
In order for us to integrate over our parametrized geometry with the change-of-variables theorem, we must study the component known as a restriction. Let’s consider the following scalar function \(f\) and vector function \(\boldsymbol r\):
We wish to determine the functional composition \(f(\boldsymbol{r}(u,v,w))\). If \(\boldsymbol r\) represents a parametrized geometric region, we call this a restriction of \(f\) to \(\boldsymbol r\). What we want is for the first entry in \(\boldsymbol r\) to replace \(x\), its second entry should replace \(y\) and so on.
Let’s define \(\boldsymbol r\) as a simple vector:
u,v,w = symbols('u v w')
r = Matrix([u -v, w**2, v*(u+w)])
r
\(f\) can be defined as either a Sympy expression (that is, stored as a simple variable), a standard Python function, or as a lambda function:
x,y,z = symbols('x,y,z', real =True)
# Sympy expression
f_sym = x+y+z
# Standard Python function
def f_function(x,y,z):
return x+y+z
# Lambda function
f_lam = lambda x,y,z : x+y+z
A composition like \(f(\boldsymbol{r}(u,v,w))\) is computed using different syntax depending on your choice among the above:
fr_sym = f_sym.subs(zip((x,y,z), r)).simplify()
fr_function = f_function(*r).simplify()
fr_lam = f_lam(*r).simplify()
fr_sym, fr_function, fr_lam

The Sympy expression makes use of zip, which substitutes the variables by the vector entry by entry - as a “zipper” - such that the first vector entry r[0] substitutes x, r[1] substitutes y, and r[2] substitutes z.
This is not necessary for Python functions or lambda functions. Instead, we here see the asterisk * used in front of the vector. This tells Python that the coordinates in r are to be given to the function as individual arguments.
Plane Integrals#
Let’s now see an example of integration over geometry. We are given a function \(f:\Bbb R^2\to\Bbb R\) by:
f = lambda x,y: 2 * x * y
f(x,y)

Let’s reuse the planar circular disc \(\mathcal C\) that we parametrized in the previous demo:
u,v = symbols('u v')
rC = Matrix([2,1]) + v * Matrix([cos(u),sin(u)])
rC
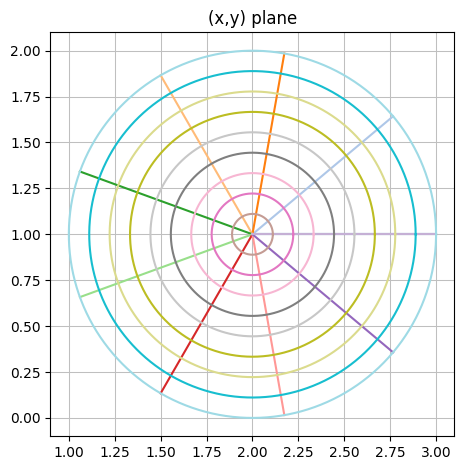
where \(u\in [0, 2\pi] ,v\in[0, 1]\). The axis-parallel rectangle \([0, 2\pi] \times [0, 1]\) in the \((u,v)\) plane maps to the circle disc in the \((x,y)\) plane:
dtuplot.plot_implicit(((x < 2*pi) & (x > 0) & (y > 0) & (y < 1)),
(x, -0.5, 2*pi + 0.5), (y, -0.5,1.5),
title="(u,v) plane",
xlabel="u", ylabel="v",
axis_center='auto')
/builds/pgcs/pg14/venv/lib/python3.11/site-packages/spb/series.py:2255: UserWarning: The provided expression contains Boolean functions. In order to plot the expression, the algorithm automatically switched to an adaptive sampling.

<spb.backends.matplotlib.matplotlib.MatplotlibBackend at 0x7f05e9c4ee50>
dtuplot.plot_parametric_region(
*rC, (u, 0, 2*pi), (v, 0, 1),
aspect="equal",
title="(x,y) plane"
)
<spb.backends.matplotlib.matplotlib.MatplotlibBackend at 0x7f05e9d30690>
We are now tasked with computing the plane integral of \(f\) over \(\mathcal C\). In mathematical notation we are calculating:
The circular region is not axis-parallel, so we need the change-of-variables theorem (variable substitution), which we in the textbook find this formula for:
The Jacobian matrix \(\boldsymbol J_{\boldsymbol r_{\mathcal C}}\) is:
JacobiM = Matrix.hstack(rC.diff(u), rC.diff(v))
JacobiM
The absolute value of the Jacobian determinant \(|\det(\boldsymbol J_{\boldsymbol r_{\mathcal C}})|\) is
Jacobian = abs(det(JacobiM)).simplify()
Jacobian

This value can be thought of as a measure for how much the \((u,v)\) parameter region is deformed locally as it undergoes the map \(\boldsymbol r_{\mathcal C}\). Our plane integral is now:
and we will do the rest in one code line:
integrate(f(*rC) * Jacobian,(u,0,2*pi),(v,0,1))

Volume Integrals#
In the previous demo we parametrized the solid unit sphere \(\Omega\) centered at the origin as follows for \(u\in[0,2\pi], v\in[0,\pi], w\in[0,1]\):
u,v,w = symbols('u v w')
r_omega = Matrix([[w*cos(u)*cos(v)],[w*sin(v)*cos(u)],[w*sin(u)]])
r_omega
In the following we will be doing volume integrals through this sphere. As this is not an axis-parallel region in \((x,y,z)\) space, we will need the change-of-variables theorem to push the integration over to the axis-parallel \((u,v,w)\) parameter space:
Finding the Sphere Volume#
According to the textbook, in order to find the “size of the geometry”, which in this case of a three-dimensional sphere is its volume, the function \(f:\mathbb{R}^3 \to \mathbb{R}\) in the change-of-variables theorem should have the value \(f(\boldsymbol{x}) = 1\). This simplifies the change-of-variables formula to:
The Jacobian matrix of our \(\Omega\) parametrization can be found with dtumathtools’s jacobian command:
J_omega = r_omega.jacobian([u,v,w])
J_omega
The absolute value of the Jacobian determinant is:
Jacobian = abs(det(J_omega)).simplify()
Jacobian

And we can now do the volume integral to find the volume:
V = integrate(Jacobian, (u, 0, 2*pi), (v, 0, pi), (w, 0, 1))
V

Compare this with the volume formula of a unit sphere from basic geometry.
Finding the Mass of the Sphere#
We now interpret the function \(f:\mathbb{R}^3 \to \mathbb{R}\) as a mass density function of our solid sphere \(\Omega\). Such mass density will have fitting physical units, e.g. \(\mathrm{kg/m^3}\), that aren’t important in a mathematical context. With this \(f\) we are able to compute the total mass of \(\Omega\). Again this is simply a volume integral of \(f\) over the geometry carried out via the change-of-variables theorem.
The mass density function we will be using is:
f = lambda x,y,z: 2*sqrt(x**2 + y**2 + z**2)
We can reuse the Jacobian matrix of \(\boldsymbol r_\Omega\), and hence also the absolute value of its Jacobian determinant, found earlier since it ties to the parametrization, not to the function. This time \(f\) is not \(1\) so we must remember to include the restriction of \(f\) to \(\boldsymbol r_\Omega\) in the integrand:
integrand = (f(*r_omega) * Jacobian).simplify()
integrand

The new volume integral, this time representing the mass of the sphere, is:
M = integrate(integrand, (u, 0, 2*pi), (v, 0, pi), (w, 0, 1))
M

Line Integrals#
For performing a line integral \(\int_{\mathcal K}f\, \mathrm{d}s\) of a function \(f\) along a curve \({\mathcal K}\), the change-of-variables theorem in the textbook lets us push the integration to the parameter space if we have a proper parametrization of the curve available. Then the formula is:
Finding Curve Length#
We are given a parameter curve with \(u \in [0, 2\pi]\):
u = symbols('u', real=True)
r = Matrix([sin(u), sin(u)*cos(u)])
r
p_curve = dtuplot.plot_parametric(*r, (u,0,2*pi), use_cm=False, label="r(u)",axis_center="auto")
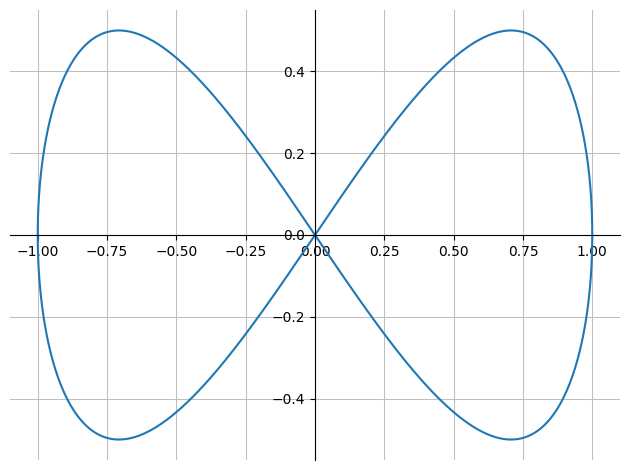
We wish to find the length of this rather unusual curve for which we have no elementary geometric formula. According to the textbook, the length can be found as a line integral if we let \(f(x)=1\).
The tangent vector \(\boldsymbol r'(u)\) is:
dr = r.diff(u)
dr
and it’s norm is found with a convenient command from dtutools:
Jacobian = dtutools.l2_norm(dr)
The length of the curve is thus:
L=integrate(Jacobian, (u,0,2*pi)).n()
where .n() forces the result to be shown numerically. So, the curve is around 6 units long.
Tangent Lines#
Now that we have found the tangent vector, we can easily construct tangent lines from any point on the curve, should we need this, e.g. for a nice plot. Construct a tangent line as any straight line with a point on it plus a direction vector times a parameter:
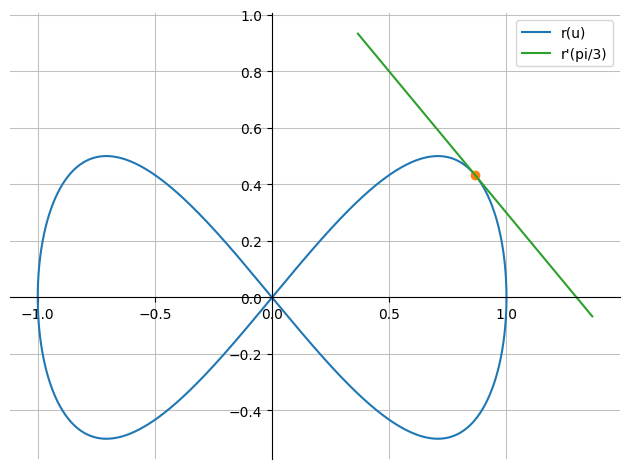
The tangent line at, for example, \(\boldsymbol x_0=\boldsymbol r(\pi/3)\) is parametrized as follows, for \(t\in \Bbb R\):
t = symbols("t")
r_tan = r.subs(u,pi/3) + t*dr.subs(u,pi/3)
r_tan
p_point = dtuplot.scatter(r.subs(u,pi/3), show=False)
p_tan = dtuplot.plot_parametric(*r_tan, (t,-1,1), use_cm=False, label="r'(pi/3)", show=False)
(p_curve + p_point + p_tan).show()
A Line Integral along a Space Curve#
We are now given a function:
x,y,z = symbols("x y z")
f = lambda x,y,z: sqrt(x**2 + y**2 + z**2)
f(x,y,z)
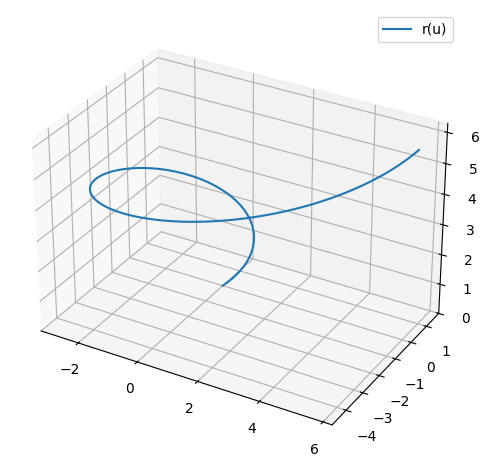
and a parameter curve \({\mathcal K}\) for \(u\in[0,5]\) - as we are in 3D space, this is known as a space curve:
u = symbols('u', real=True)
r = Matrix([u*cos(u), u*sin(u), u])
r
p_spacecurve = dtuplot.plot3d_parametric_line(*r, (u,0,2*pi), use_cm=False, label="r(u)",aspect="equal", legend=True)
Let’s compute the line integral:
The tangent vector and its norm (our Jacobian function):
dr = r.diff(u)
Jacobian = dr.norm().simplify()
Jacobian

Note: Had u not been defined as a real variable with symbols('u', real=True), then dr.norm() couldn’t be used and you would instead have to use dtutools.l2_norm(dr).
The restriction:
restriction = f(*r).simplify()
restriction

All components are ready, and we find the line integral along the curve:
integrate( restriction * Jacobian ,(u,0,5)).evalf()

Should we be in need of its length, then we simply leave out the function \(f\):
integrate(Jacobian,(u,0,5)).evalf()

Assumptions#
Notice that our restriction in the above line integral calculation contains an absolute-value symbol, \(|u|\):
restriction
Often, Sympy doesn’t mind and can do an integration with it just fine, as we saw above. But should the integrations be more advanced and make Sympy struggle or spend a long time, then we can give Sympy a hand by handling this absolute value manually first.
In this case, since \(u\in [0, 5]\) then \(u\) is always positive and the absolute-value symbol can be removed without consequence. Sympy does not know that from the definition u = symbols('u', real=True), so we could redefine as
u = symbols('u', real=True, nonnegative=True)
r = Matrix([u*cos(u), u*sin(u), u])
restriction = f(*r).simplify()
restriction

Note that we have to define r = Matrix([u*cos(u), u*sin(u), u]) and carry out the calculation restriction = f(*r).simplify() again after having redefined u - the previous definition of r would otherwise still use the previous definition of u. If Sympy does not automatically reduce the absolute-value lines away, then use refine():
refine(restriction, Q.nonnegative(u))
Q.nonnegative(u) enforces the assumption of non-negativity. For other assumptions, replace the .nonnegative() part with other entries in this table.
Surface Integrals#
Consider a function \(f: \mathbb{R}^3 \to \mathbb{R}\) given by
x,y,z = symbols('x y z', real=True)
def f(x,y,z):
return 8*z
f(x,y,z)

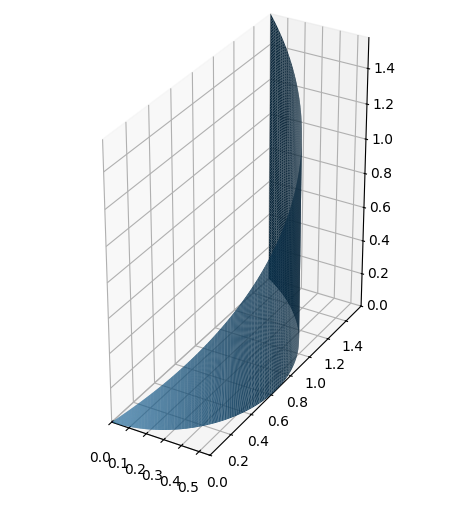
Also consider a surface \({\mathcal S}\) given by the following parametric representation, where \(u \in [0,\frac{\pi}{2}],v \in [0,1]\):
u,v = symbols('u v', real=True, nonnegative=True)
r = Matrix([u*cos(u),u*sin(u),u*v])
r
This time we remembered nonnegative=True as, again, neither \(u\) nor \(v\) can be negative. The geometry that this parametrization represents is known as a cylinder surface since it extends upwards like a piece of a cylindrical “wall”:
dtuplot.plot3d_parametric_surface(*r,(u,0,pi/2),(v,0,1), aspect='equal')
<spb.backends.matplotlib.matplotlib.MatplotlibBackend at 0x7f05c3b13410>
Our job is to find the surface integral of \(f\) over the surface \({\mathcal S}\). For that we employ the change-of-variables theorem, for which the textbook gives us this formula for our case:
The Jacobian function is this time the norm of the cross product between the two partial derivatives of the parametrization:
crossproduct = r.diff(u).cross(r.diff(v))
Jacobian = sqrt((crossproduct.T * crossproduct)[0]).simplify()
Jacobian

The integrand:
integrand = f(*r) * Jacobian
integrand
The surface integral:
integrate(integrand,(v,0,1),(u,0,pi/2)).evalf()

Had we preferred the area of the surface, then we would simply leave out the function, as always:
A=integrate(Jacobian,(v,0,1),(u,0,pi/2)).evalf()
A
